|
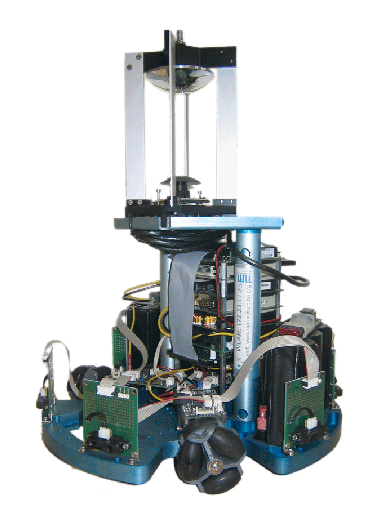
Der Robertino ist ein Roboter, der über 3 Räder bewegt werden
und mit 3 Infrarotsensoren seine Umgebung abtasten kann. Die Räder
des Robertino werden von Elektromotoren betrieben, welche mit jeweils
einem Atmel ATMega8535 Controller verbunden sind und von diesem gesteuert
werden können.
Im Rahmen dieses Experiments soll eine verteilte Steueranwendung entworfen
werden, die den Robertino umher fahren und Hindernissen ausweichen
lässt. Als Infrastruktur soll hierfür die am Lehrstuhl entwickelte
eingebettete Java Middleware KESO verwendet
werden. KESO basiert auf einem ereignisgesteuerten OSEK Betriebssystem.
In einer früheren Studienarbeit wurde eine solche Steuerung bereits
auf KESO basierend entwickelt, wobei einer der drei AVR Knoten eine
Sonderrolle (Masterknoten) einnimmt und den anderen Knoten (Slaveknoten)
Steuerungskommandos erteilt. In diesem Experiment soll als Masterknoten
hingegen ein Tricore TC1796b Mikrokontroller fungieren, der die Steuerung
übernimmt. Die AVR Knoten sind durch einen CAN Bus verbunden, an den
auch der Tricore Kontroller angeschlossen werden soll.
Die Aufgabe umfasst im wesentlichen die Programmierung des Tricore
Controllers inkl. eines CAN Treibers für diesen Controller. Die
Software der Slave AVR Knoten kann vorraussichtlich mit kleineren
Anpassungen weiterverwendet werden. Auch die bereits vorhandene
Steuerungslogik kann weiterverwendet --- aber natürlich auch nach
Belieben angepasst werden.
|
Gruppengröße:
|
3 Bearbeiter
|
|
Betriebssystem:
|
KESO/ProOSEK
|
|
Steuerrechner:
|
Infineon TriCore TC1796,
Atmel ATMega8535
|
|
Toolchain:
|
KESO build tools,
TriCore GNU Toolchain
|
|
Peripherie:
|
- I/O Ports
- A/D-Wandler
- Timer
- CAN
|
|
Ziele:
|
- Steuerung der AVR Knoten durch den Tricore
- Selbstständige Bewegung des Roboters in der Ebene
- Hindernissen wird ausgewichen
|
|