


In operating systems, waiting states are an essential feature to keep up the illusion that every thread is alone on the machine. In general-purpose operating systems, waiting states occur when data is read from the hard drive or when data is written from a network socket. A thread can also wait for the completion of work executed in another thread. Here, one thread waits for a signal the other thread provides. Waiting states are also part of real-time operating systems, like the OSEK standard. We've now implemented this feature, which is required for the OSEK ECC1 conformance class.
Scheduling in dOSEK
The core of dOSEK is the priority-driven scheduler. Since OSEK is a static operating-system standard, we know, for a specific system, exactly how many threads exists. This number will never change, it is configured at compile time. The scheduler selects always the thread with the highest priority that is runnable and executes it. In dOSEK, a thread is runnable, if its priority is larger than the priority of the idle thread. In pseudo code, the scheduler/dispatcher looks like this:
schedule() {
current_thread = idle_id;
current_prio = idle_prio;
updateMax((current_thread, current_prio),
(thread_1_id, thread_1_prio));
updateMax((current_thread, current_prio),
(thread_2_id, thread_2_prio));
updateMax((current_thread, current_prio),
(thread_3_id, thread_3_prio));
switch_to_thread(current_thread);
}
The scheduler is generated for the specific system (in this case, for a
system with 3 threads), and contains a updateMax() cascade.
updateMax() is a hardened operation, that updates the first input
tuple with the second one, iff the priority of the second argument-tuple
(second tuple, second item) is higher than the priority of the first
tuple. In the first cascade element, current_thread is set to
thread_1_id, if current_prio < thread_1_prio. In pseudo code:
updateMax((a, b), (c, d)) {
if (b < d) {
(a, b) = (c, d);
}
}
Events in OSEK
In OSEK, events are the only possibility for a thread to wait on
something. Each thread can receive a number of event signals. With the
system call WaitEvent(), a thread can wait for one or more events to
happen. If any of the events from the list got signaled by another
thread with SetEvent, the waiting thread unblocks. Signals are not
automatically cleared, but must be cleared explicitly by ClearEvent.
A version with branches can be implemented by two bit masks:
struct Thread {
...
event_mask_t events_waiting;
event_mask_t events_set;
...
};
SetEvent(Thread t, event_mask_t m) {
t.event_set |= m;
}
WaitEvent(Thread t, event_mask_t m) {
t.event_waiting = m;
}
ClearEvent(Thread t, event_mask_t m) {
// Remove the event mask bitwise
t.event_waiting &= ~m;
t.event_set &= ~m;
}
Schedule() {
...
if (thread_1.event_waiting != 0
|| (thread_1.event_waiting & thread_1.event_set) != 0) {
updateMax((current_thread, current_prio),
(thread_1_id, thread_1_prio));
}
In this simple variant, we maintain a event_waiting mask containing
a bit mask of events a the thread is waiting for. The event_set
bit mask holds a bit mask of signaled events. If a thread is waiting,
and none of the waited signals is set, we exclude the thread from the
updateMax() cascade. It is blocked.
But there is one problem with dependability: we have branches. Branches are evil; making them resilient against soft-errors is hard. Therefore, we want to have a branchless version.
Events in dOSEK
Shortly explained, in the branchless version, we let the priority of a
thread drop below the idle priority, if it currently blocks. Therefore,
we calculate a blocking term for every thread that is either zero or the
highest priority in the system. This blocking term is subtracted from
the thread priority, when calling updateMax():
updateMax((current_thread, current_prio),
(thread_1_id, thread_1_prio - blocking_term));
For each event, a thread can receive, we have two integer variables W
(for waiting) and S (for set). Both variables can have two values:
either 0 or High (for highest priority in the system).
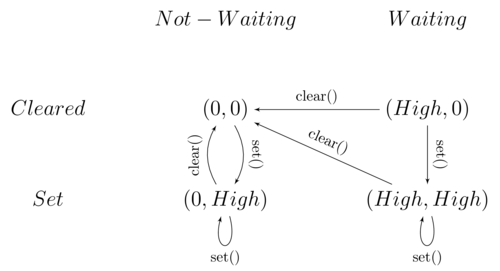
In this diagram, we see all four states a event can have. A event is a
tuple of (W, S). The set() and clear() operations set override the
tuple. If we want to wait for an event mask, we set the W flag
accordingly for all events a thread can wait for:
struct Event {
int W;
int S;
};
Event thread_1_event_a;
Event thread_1_event_b;
...
WaitEvent(Thread t, event_mask_t m) {
// t is always known at compile time, and this cascade is generated for the system.
if (t == thread_1) {
if (m & 1)
thread_1_event_a.W = High;
else
thread_1_event_a.W = 0;
if (m & 2)
thread_1_event_b.W = High;
else
thread_1_event_b.W = 0;
}
}
But how can we now deduce the blocking_term from the event states?
First we calculate the blocking_term for a single event. We use a
matrix notation that captures all four states from the diagram shown
before.
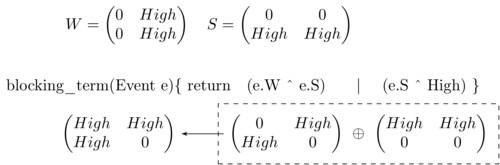
By the blocking term, we generate a term for each event that is
only 0, if the event was used for blocking and is set. In all other
cases, the blocking term is High. We achieved this by using only
bit wise XOR and OR operation. We're still branchless! :-)
We combine now all blocking terms of all events a specific task can wait
for with AND. The result is only zero if at least single event,
which is on the waiting list, is set. Furthermore, we determine whether
we can block in the first place, by combining all W states with OR.
The should_wait variable is either High, if we're waiting; or 0 if
we're not waiting.
does_block = blocking_term(thread_1_event_a) & blocking_term(thread_1_event_b); should_wait = thread_1_event_a.W | thread_1_event_b.W; blocking_term = should_wait & blocking_term;
Combining both variables with AND, we achieve our blocking term.
Branchless. And we can subtract it, before we call the updateMax(),
from the threads priority.