Echtzeitsysteme 2 - SS 2006
Experimente - Truck
Moderne Autos beherbergen eine Fülle elektronischer Steuergeräte, und ihre Anzahl wird wohl auch in Zukunft weiter wachsen. Viele dieser Steuergeräte führen dabei Aufgaben aus, die mit harten Zeitbeschränkungen konfrontiert sind, z.B. ABS, Airbag, Motorsteuerung, wobei auch hier die Anzahl dieser zeit- und sicherheitskritischen Systeme in Zukunft weiter zunehmen wird (z.B. X-by-Wire = Steer-by-wire, break-by-wire, ...).
Auf der anderen Seite ist aber auch der Energieverbrauch solcher Systeme wichtig, schließlich spiegelt er sich auch im Treibstoffverbrauch wider. Der Energieverbrauch solcher Systeme ist also duch verschieden Stromspartechniken (z.B. Herabsetzen der CPU-Taktfreqeuenz) möglichst gering zu halten. Das hat natürlich zur Folge dass die Rechenleistung des Prozessors keine Konstante mehr ist, ebenso wie die WCETs verschiedener Komponenten. In welchem Rahmen kann man also die Taktfrequenz der CPU verändern, ohne die Einhaltung von harten Zeitschranken zu gefährden?
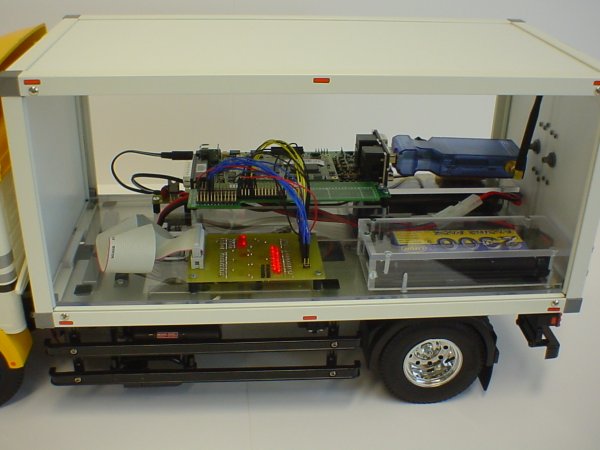
An unserem Lehrstuhl gibt es einen fernsteuerbaren LKW, dessen Originalsteuerung durch einen Eigenbau ersetzt wurde. Für die Realisierung dieses Eigenbaus wurden dabei Komponenten verwendet, die auch im Automobilbau verwednung finden. Diese Steuerelektronik nimmt Kommandos von einem modifizierten Logitech-Lenkrad entgegen und steuert dementsprechend Motor, Getriebe, Bremse und Lichter an. Die Verarbeitung der einzelnen Ereignisse kann man durchaus als zeitkritische Aufgaben auffassen. Des weiteren besitzt der LKW als Energiequelle Akkus, ein möglichst geringer Energieverbrauch der Steuerung ist also wünschenswert. Dafür soll versucht werden, die Taktfrequenz der CPU zu drosseln, um eine möglichst gerine Stomaufnahme zu erreichen, gleichzeitig aber auch die Zeitbeschränkungen unter allen Umständen eingehalten werden.
|
Gruppengröße:
|
3
|
|
Betriebssystem:
|
PURE, eCos, ProOSEK
|
|
Steuerrechner:
|
Motorola PowerPC MPC565
|
|
Toolchain:
|
GNU PowerPC
|
|
Peripherie:
|
wird noch bekannt gegeben
|
|
Ziele:
|
- Entwicklung der Software für das LKW-Steuergerät
- Skalierung der CPU-Taktfrequenz des Steuergeräts
|