Die meisten Leute dürften diese Jahrmarktattraktion kennen: der
Hau den Lukas. Inzwischen etwas aus der Mode gekommen
erfreute sich dieses Gerät früher sehr großer Beliebtheit. Das Prinzip
ist ebenso einfach, wie es anscheinend anziehend ist (oder vielleicht
auch war): Durch einen gezielten, kräftigen Schlag mit einem Hammer
auf das Ende eines Hebels versucht man ein Gewicht, das am anderen
Ende des Hebels in einer Führung befestigt ist, zu beschleunigen. Je
stärker der Schlag, desto höher die Beschleunigung und umso weiter
wird das Gewicht in der Führung nach oben befördert. Das Ziel ist es,
mit dem Gewicht eine Glocke zu erreichen, die am Ende der Führung
befestigt ist.
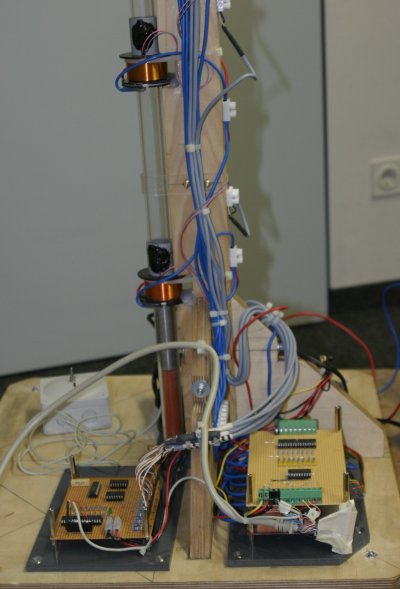
Auch an unserem Lehrstuhl ist ein Gerät entstanden (vielen Dank an Daniel),
das einem solchen Hau den Lukas sehr ähnlich ist, gewissermaßen eine
elektronische Variante eines Hau den Lukas. Im Gegensatz zum
traditionellen Hau den Lukas sorgt hier nicht Muskelkraft, sondern
Elektrizität und Magnetismus für die Beschleunigung des Gewichts. Das
Gewicht ist ein Metallzylinder der durch eine Plexiglasröhre geführt
wird. An der Plexiglasröhre sind in regelmäßigen Abstand Spulen
angebracht, die durch ihre magnetische Wirkung den Zylinder nach oben
ziehen können. Oberhalb einer jeden Spule befindet sich eine
Lichtschranke, mit deren Hilfe man den Ausschaltzeitpunkt der Spule
bestimmen kann, alternativ kann dafür auch die Spannung gemessen
werden, die an der Spule abfällt. Diese Spannung ändert sich nämlich,
wenn der Eisenkern die Spule betritt, außerdem kann man an ihr
ablesen, wann die Spule beginnt, denn Kern abzubremsen.
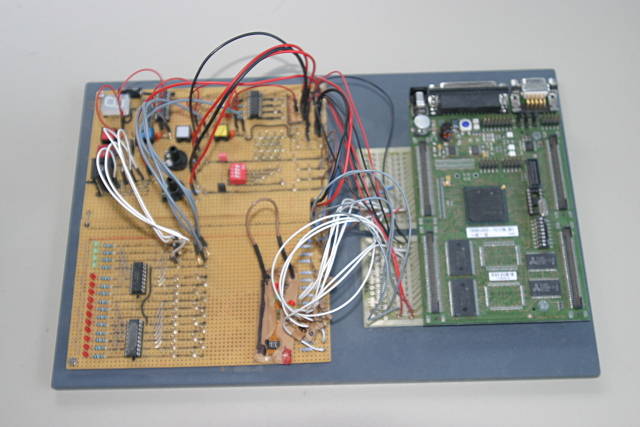
Auch die Steuerung erfolgt nicht manuell, mittels eines Hammers,
sondern mit Hilfe eines Mikrocontrollers, nämlich dem TriCore TC1796
von Infineon. Dieser Mikrocontroller ist ein Mitglied der
TriCore-Mikrocontroller Familie und findet hauptsächlich im
Automobilbereich Verwendung. Er besitzt einen 32-bit RISC-Kern,
zahlreiche I/O-Ports, Timer, A/D-Wandler, serielle Schnittstellen
(synchron und asynchron), CAN-Schnittstellen sowie etwa 192 KB
internes RAM, 2 MB internes Flash, 1 MB externes RAM und 4 MB externes
Flash.
Aufgabenstellung 1
Das primäre Ziel dieses Experiments ist es, eine Steuerung für den
Hau-den-Lukas zu entwickeln, das die Kontrolle des Projektils
erlaubt. Die Steuerung soll es erlauben, den Eisenkern schrittweise
bzw. kontinuierlich den Eisenkern anzuheben, fallen zu lassen oder
pendeln zu lassen. Neben den Echtzeitbedingungen, die sich alleine
durch die Steuerung des Projektils ergeben (schaltet man eine Spule zu
spät ein oder aus, gelingt die Kontrolle des Projektils nicht mehr),
ergeben sich noch einige weitere Randbedingungen. So darf eine Spule
z.B. nicht länger als 4 Sekunden eingeschaltet sein, weil die hohe
Temperatur sonst die Plexiglasröhre zum Schmelzen brächte. Auch darf
immer nur eine Spule auf einmal eingeschaltet werden, weil die maximale
Stromaufnahme der Schaltung eine gewisse Grenze nicht überschreiten
darf.
Gruppengröße:
3 Bearbeiter
Ziele:
Eisenkern anheben
Eisenkern schrittweise fallen lassen
Eisenkern gebremst fallen lassen
Eisenkern pendeln lassen
Aufgabenstellung 2
Eine zweite Gruppe soll ein einfaches Bedienpult für den Hau-den-Lukas
entwickeln. Voraussetzung für die Bearbeitung dieser Aufgabenstellung
ist natürlich, dass eine Gruppe die Aufgabenstellung 1 bearbeitet. Das
Bedienpult soll es ermöglichen, zwischen verschiedenen, fest
vorgegebenen Abläufen auszuwählen und auch neue Abläufe
einzugeben. Wie in vielen realen Systemen gefordert, soll auch dieses
Bedienpult eine Not-Aus-Funktion implementieren, d.h. sobald
ein bestimmtes Kommando abgesetzt wurde, soll der normale Betrieb
unterbrochen werden und in einen sicheren Zustand gezwungen
werden. Eine weiter Funktion, die das Bedienpult übernehmen soll, ist
eine Überwachungsfunktion und die Anzeige des Zustands des
Systems. Sollte im System ein kritischer Zustand erreicht werden, soll
auch diese Überwachung einen Not-Aus veranlassen.
Die Realisierung dieses Bedienpults kann selbstverständlich nicht in
völliger Isolation erfolgen, sondern muss in Kooperation mit der
Aufgabenstellung erfolgen. Man muss beispielsweise gemeinsam eine
Lösung finden, wie das Not-Aus-Kommando in der Steuerung
behandelt werden soll, oder welche Information man zur Überwachung des
Systems benötigt. Das Bedienpult soll über TTCAN/CAN oder die serielle
Schnittstelle mit der eigentlichen Steuerung kommunizieren.