Ein Quadkopter ist ein Fluggerät, das durch vier, an den Eckpunkten
eines (i.d.R. rechtwinkligen oder quadratischen) Vierecks
befestigten, Rotoren angetrieben und auch gesteuert wird. Ihre
momentane Bekanntheit verdanken diese Fluggeräte vor allem Plänen, sie
als unbemannte Aufklärungs- und Spionagedrohnen einzusetzen.
Die Steuerung dieses Fluggeräts erfolgt über ein gezieltes Abbremsen
und Beschleunigen bestimmter Rotoren. Dreht sich ein bestimmter Rotor
langsamer, als die übrigen Rotoren, ist an dieser Stelle der Auftrieb
geringer und der Quadkopter neigt sich zur Seite - der Quadkopter
beginnt in diese Richtung zu schweben.
Aufgabenstellung
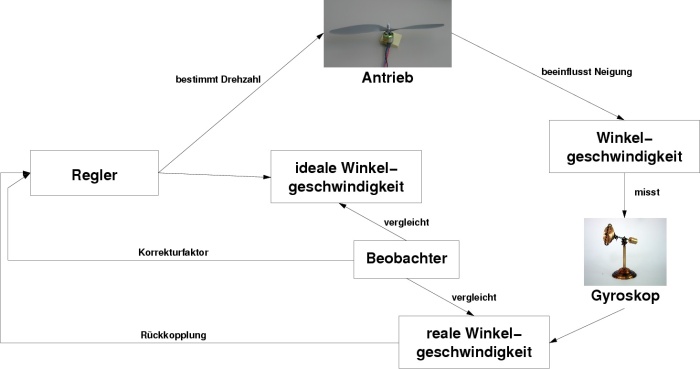
Der Quadkopter wird im wesentlichen durch einen Regelkreis
kontrolliert: ein Regler steuert die Drehzahlen der einzelnen Rotoren,
was sich wiederum auf die Drehung des Quadkopters auswirkt. Diese
Drehung wird durch ein Gyroskop erfasst und wieder an den Regler
weiter geleitet, wodurch der Regelkreis geschlossen wird.
Häufig ist es so, dass die reale Winkelgeschwindigkeit nicht
mit der idealen Winkelgeschwindigkeit, vom Regler bestimmten
Winkelgeschwindigkeit übereinstimmt, weil das physikalische Modell
nicht hinreichend genau ist (z.B. wenn man nicht berücksichtigt, dass
sich die Kennlinie eines Motors ändert, wenn sie dessen Temperatur
verändert). Daher wird das System beobachtet und ein Beobachter
gleicht die idealen und realen Werte und bestimmt
daraus einen Korrekturfaktor, der auch als Eingabe für den Regler
dient.
Ein weiteres Problem sind die Messwerte die man vom Gyroskop bekommt -
diese sind meist mit einem gewissen Rauschen behaftet. Diesem Problem
kann man zu Leibe rücken, indem man z.B. Differenzenverstärker in das
System integriert, und zusätzlich die gemessenen Werte filtert.
In dieser Aufgabenstellung soll nun der Regelkreis, der Beobachter und
die Filterung der Messwerte implementiert werden.