Der Carolo-Cup ist ein studentischer
Wettbewerb mit dem Ziel autonom gesteuerte Modellautos im Maßstab 1:10 zu
entwickeln. Die entwickelten Modellautos messen sich in drei verschiedenen
Disziplinen:
Abfahren eines Rundkurses ohne Hindernisse
Abfahren eines Rundkurses mit Hindernissen
paralleles Einparken
Der abzufahrende Rundkurs ist vorher nicht bekannt und wird durch
Fahrbahnmarkierungen definiert, deren grundsätzliche Dimensionen vorher bekannt
sind. Wie in der Realität auch, können diese Fahrbahnmarkierungen an diversen
Stellen Lücken aufweisen, was nicht dazu führen darf, dass das Auto die Strecke
verlässt. Als Hindernisse werden auf dem Rundkurs weiße Quader platziert, die zu
Umfahren sind, wobei der dafür notwendigen Spurwechsel korrekt durch Blinken
angezeigt werden muss. Zusätzlich enthält der Rundkurs Kreuzungen, die an einer
Haltelinie erkannt werden müssen, und an denen entsprechend abzubremsen ist.
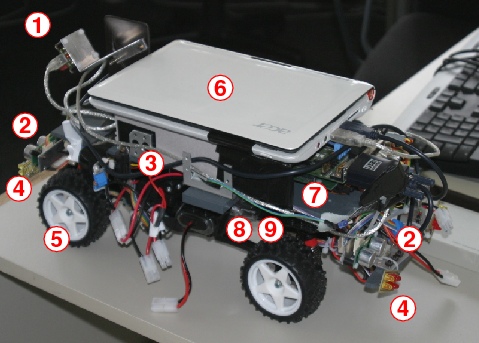
Auf dem oben stehenden Bild ist das FAUtomobil abgebildet, also das Modellauto
mit der Erlanger FAUtomobilclub am Carolo-Cup teilgenommen hat. Das gegenwärtige
Auto ist eine Leihgabe des Veranstalters des Carolo-Cup also der TU
Braunschweig. Für den nächste Carolo-Cup im Februar 2010 soll der FAUtombilclub
aber mit einem eigenen Auto an den Start gehen, wofür wir auf jeden Fall die
tatkräftige Unterstützung von vielen Studenten benötigen!
Das gegenwärtige Auto hat eine Kamera (1) aus deren Bilder die Strecke,
Hindernisse und Haltelinien an Kreuzungen erkannt werden. Die hierfür notwendigen
Berechnung finden ebenso auf einem Netbook (6) mit einem Intel Atom Prozessor
statt, wie Planung der zu fahrenden Strecke. Für die Umsetzung der
Entscheidungen, die auf dem Netbook getroffen werden, ist ein TriCore TC1796
Mikrocontroller (7) zuständig, der diverse Sensoren und Aktoren des Autos
ansteuert. An Sensoren besitzt das Auto neben der Kamera noch
Ultraschallsensoren (2), die den Abstand zu evtl. Hindernissen messen,
Infrarotsensoren (3), mit denen z.B. die Länge einer Parklücke bestimmt werden
kann, und Encoderscheiben an den Vorderrädern (5), die zur
Geschwindigkeitsbestimmung genutzt werden. Als Aktoren stehen dem
Mikrocontroller LEDs (4) z.B. für die Fahrtrichtungsanzeige, ein Lenkservo (8)
und ein Fahrtenregler (9), um die Geschwindigkeit des Autos zu beeinflussen, zur
Verfügung.
Aufgabenstellung
Das Arbeitsgebiet dieser Aufgabe beschränkt sich nahezu ausschließlich auf den
Wirkungsbereich des Mikrocontrollers. Die Steuerungsanwendung hierauf ist
momentan ereignisgesteuert implementiert, sie soll im Laufe der Veranstaltung in
eine zeitgesteuerte Anwendung konvertiert werden.
Darüber hinaus können bzw. sollen einige der Komponenten der Steuerungsanwendung
neu implementiert werden. Diese Komponenten sind u.A.
die Geschwindigkeitsregelung
die Bestimmung der Geschwindigkeit mit Hilfe der Encoderscheiben