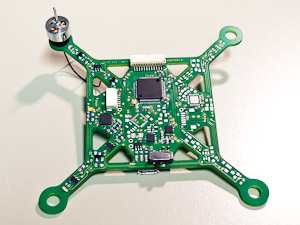
Development: First I4Nano v2 prototype has arrived form electronic manufacturing service. More details will follow shortly!
Project
I4Copter Project Flyer
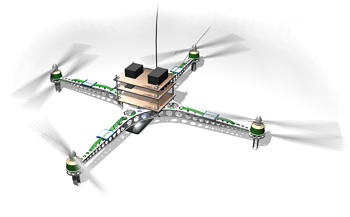
The project originally started in the context of the CoSa project, where it is intended to be deployed as a creditable demonstrator for safety-critical mission scenarios. During the development of the I4Copter
prototype, it turned out to be more of a challenge than initially expected, both in terms of complexity and applicability. The software required for flight control, navigation and communication is a comprehensive and demanding application for the underlying system software.
That is why it has emerged as a demonstrative showcase, addressing various aspects of system software research. This way, other research projects, such as CiAO, also benefit from this platform.
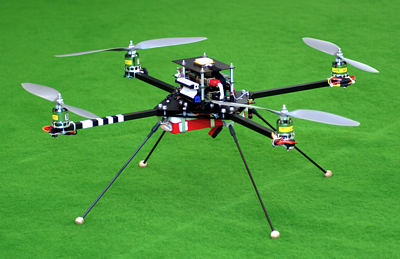
Beyond the domain of computer science, the development of a quadrotor helicopter also includes challenges in the areas of engineering, manufacturing and automatic control. That is why I4Copter
is now an interdisciplinary project with partners in other sciences. It is therefore an ideal platform for students, especially those of combined study programs (e.g. Mechatronics or Computational Engineering), showing the need for cross-domain
education.
Ulbrich, Peter: Safety-critical Embedded Systems: From Theory to the (Flying) Real World. Vortrag: Lehrstuhl für Informationstechnik für Luft- und Raumfahrt, Universität Würzburg, 18.01.2011 Stichwörter:Redundanz, I4Copter, eingebettete Systeme, embedded Systems, Echtzeitsysteme, Quadrocopter, sicherheitskritische Systeme, CoSa, CoRed
Ulbrich, Peter ; Franzmann, Florian: Safety-critical Embedded Systems: From Theory to the (Flying) Real World. Vortrag: Eingebettete Systeme und Betriebssysteme, Otto-von-Guericke-Universität Magdeburg, 08.11.2011 Stichwörter:Redundanz, I4Copter, eingebettete Systeme, embedded Systems, Echtzeitsysteme, Quadrocopter, sicherheitskritische Systeme, CoSa, CoRed
Ulbrich, Peter: Software-Based Redundancy Techniques for High-Reliability Embedded Real-Time Systems. Vortrag: Brown Bag Talks, Deutsches Forschungszentrum für künstliche Intelligenz (DFKI), Bremen, 19.04.2011 Stichwörter:Redundanz; I4Copter; eingebettete Systeme; embedded Systems; Echtzeitsysteme; Quadrocopter; sicherheitskritische Systeme; CoSa; CoRed